
-

启迪实验室|自动驾驶与自主式交通实验室-科创实践岗位招募
自动驾驶与自主式实验室专注于自动驾驶与自主式交通前沿领域,聚焦交通流理论与深度仿真、自动驾驶及其测评、自主式交通系统、自动驾驶人机共融、交通管控与数字孪生等核心技术研究,致力于突破驾驶行为与深度仿真理论、自动驾驶仿真加速测试技术、自主式交通系统“单体进化-多体协同-自洽管控”技术、人机认知交互与智能交互理论与技术、数字孪生管控优化等技术瓶颈,推动高等级自动驾驶、自主式交通等技术落地应用。
查看详细 -
迪实验室|智能工业固废处置技术-科创实践岗位招募
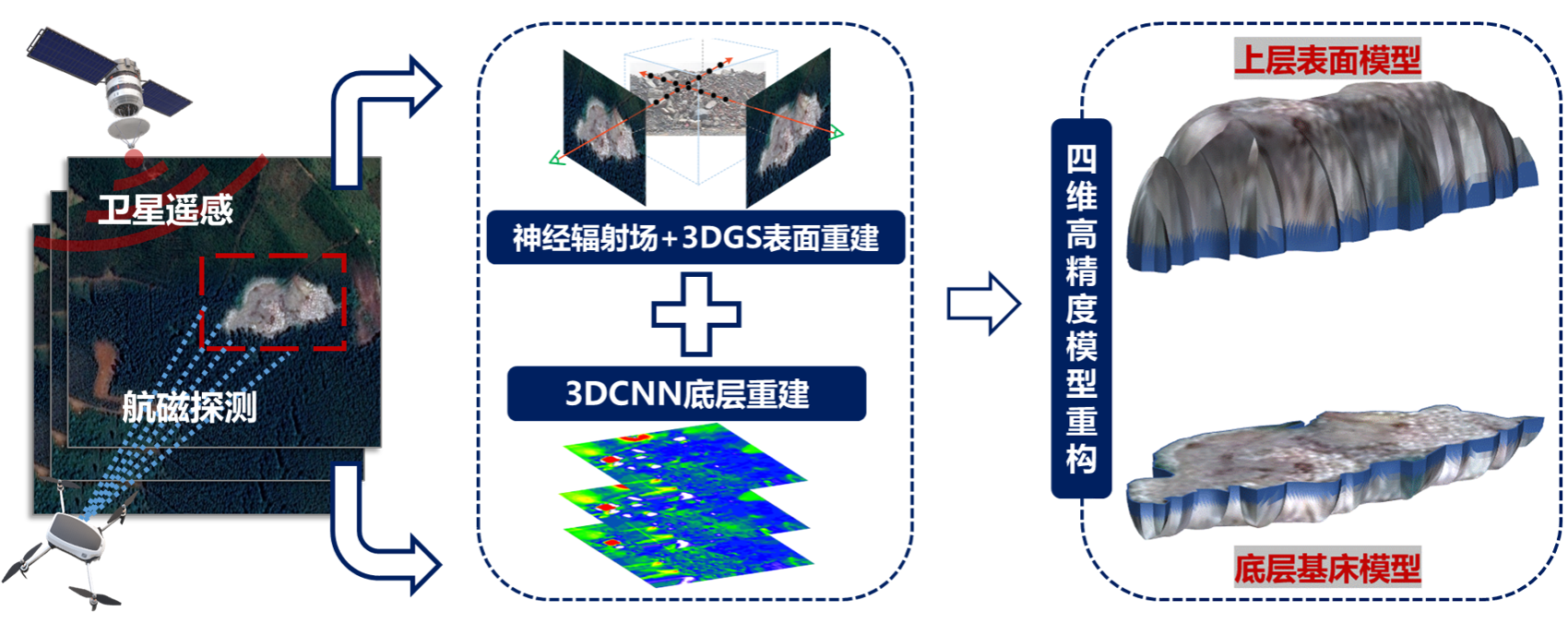
本项目融合土木工程、计算机视觉、机器人学、环境科学等多个学科,聚焦三大研究方向:1)固废堆体三维感知与体积动态评估:利用无人机/机器人搭载激光雷达(LiDAR)与深度相机,采集固废堆场三维点云数据,研发适用于复杂光照、扬尘环境的点云处理与建模算法,实现堆体体积的高精度动态估算与存量管理;2)固废处置场智能巡检与漏点识别:基于深度学习目标检测与图像分割技术,对处置场覆盖层破损、渗滤液渗漏点进行自动识别与定…
查看详细 -

启迪实验室|智能感知团队-科创实践岗位招募
面向无人机、机器人等自主智能系统, 开展“感通一体”理论与系统研究,探索利用同一套链路同时实现信息传输与环境/目标感知的新方法。重点研究高频链路建模、距离与位姿感知、感通协同算法设计,以及原型系统搭建与实验验证,形成可展示的项目成果与高水平科研产出。
查看详细 -
启迪实验室|运营期隧道大模型-科创实践岗位招募
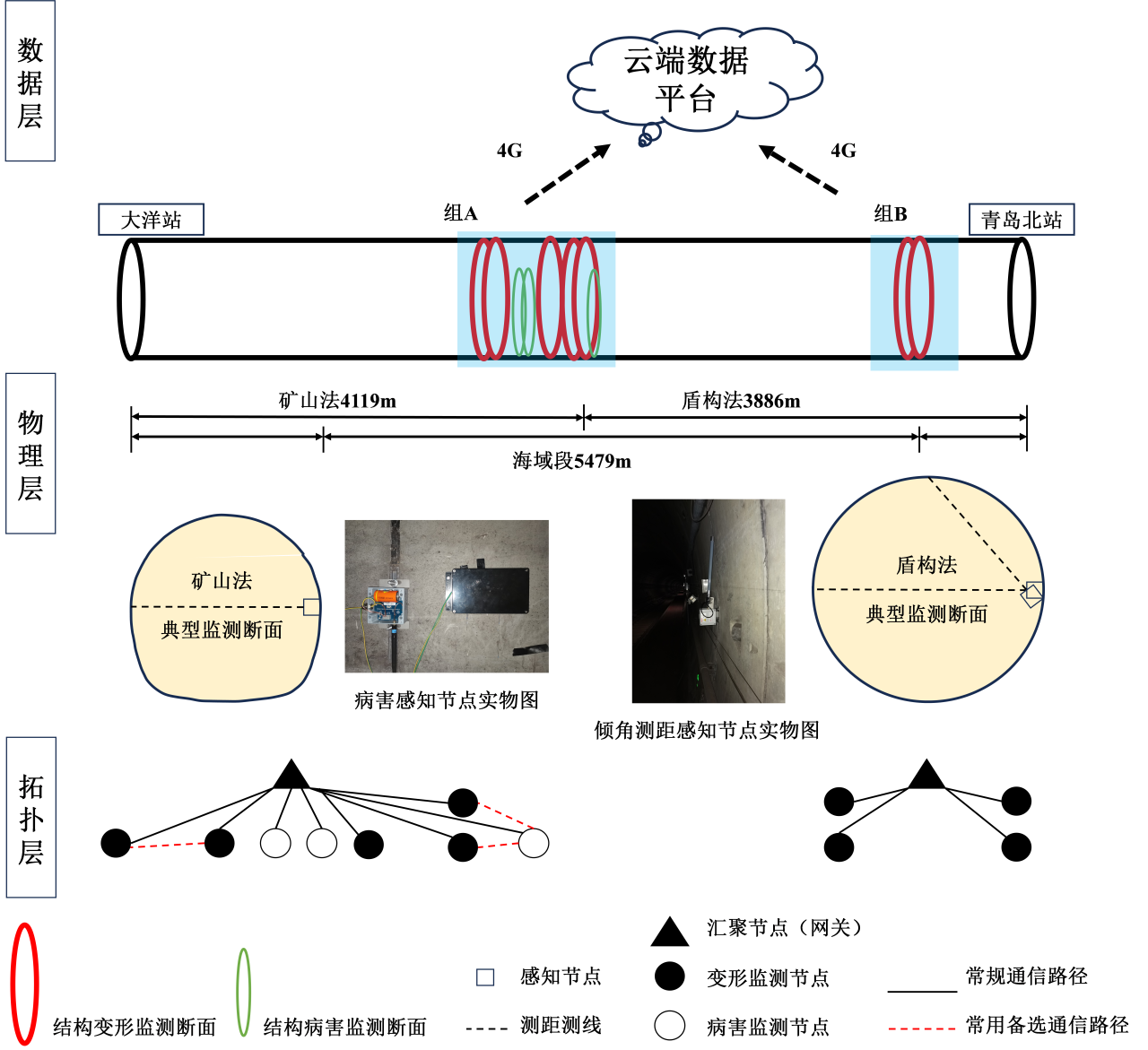
本项目将基于最新的大模型技术,研发“运营期隧道大模型”及自动化评价诊断系统。通过构建多模态数据接入框架、定制化提示词(Prompt)工程以及智能体(Agent)工作流,实现隧道多源病害数据的自动化清洗、特征提取与智能评估,最终赋能隧道及地下工程的智能化运维与防灾减灾,提升国家重大基础设施的韧性。
查看详细 -
启迪实验室|智能铺面创新实验室-科研实践岗位招募
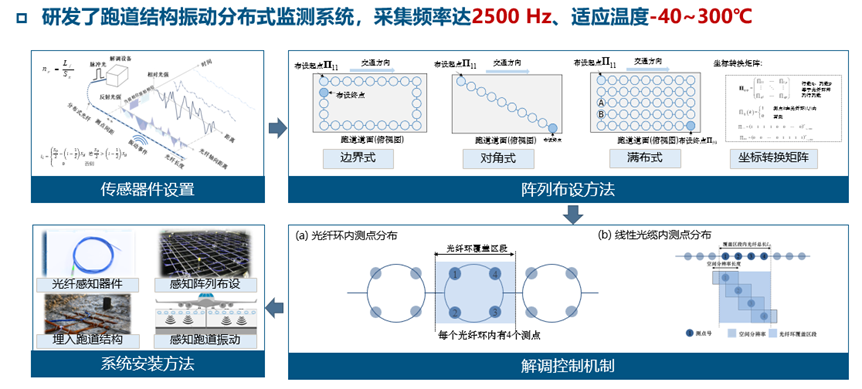
本项目聚焦智慧交通与智能基础设施两大关键领域,围绕道路结构健康监测与机场数字化设计两大方向,开展前沿技术探索与应用实践。在道路结构健康监测方面,依托高精度传感技术与多源数据融合方法,系统研究车辆荷载作用下道路路面与基层的实时振动及应变响应机制。通过开展数据处理全流程工作,构建面向智慧道路的实时感知与状态监测体系,为道路结构的安全评估、预警维护与智能化管理提供关键技术支撑。在机场数字化设计方面,项…
查看详细
科创融汇